
 فارسی
فارسی


Today, with the advancement of technology and the increase in production speed in factories, the need for automatic packaging systems is felt more and more. One of the most widely used systems in the process of automating packaging are pick & place robots . These robots are produced in different types and are used in a wide range of industries.

Robots are blind and cannot recognize the location of objects, a machine vision system can act as the eyes of a robot and send the location of objects to the robot so that the robot can use the location coordinates to pick up the objects. In this paper, we have modeled a machine vision system to determine the coordinates of the product and send it to the robot.
Equipment required for the machine vision system in the packaging robot
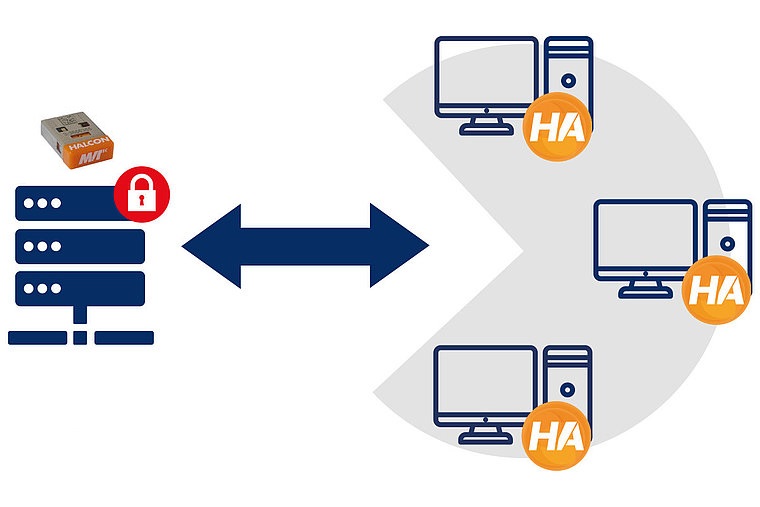
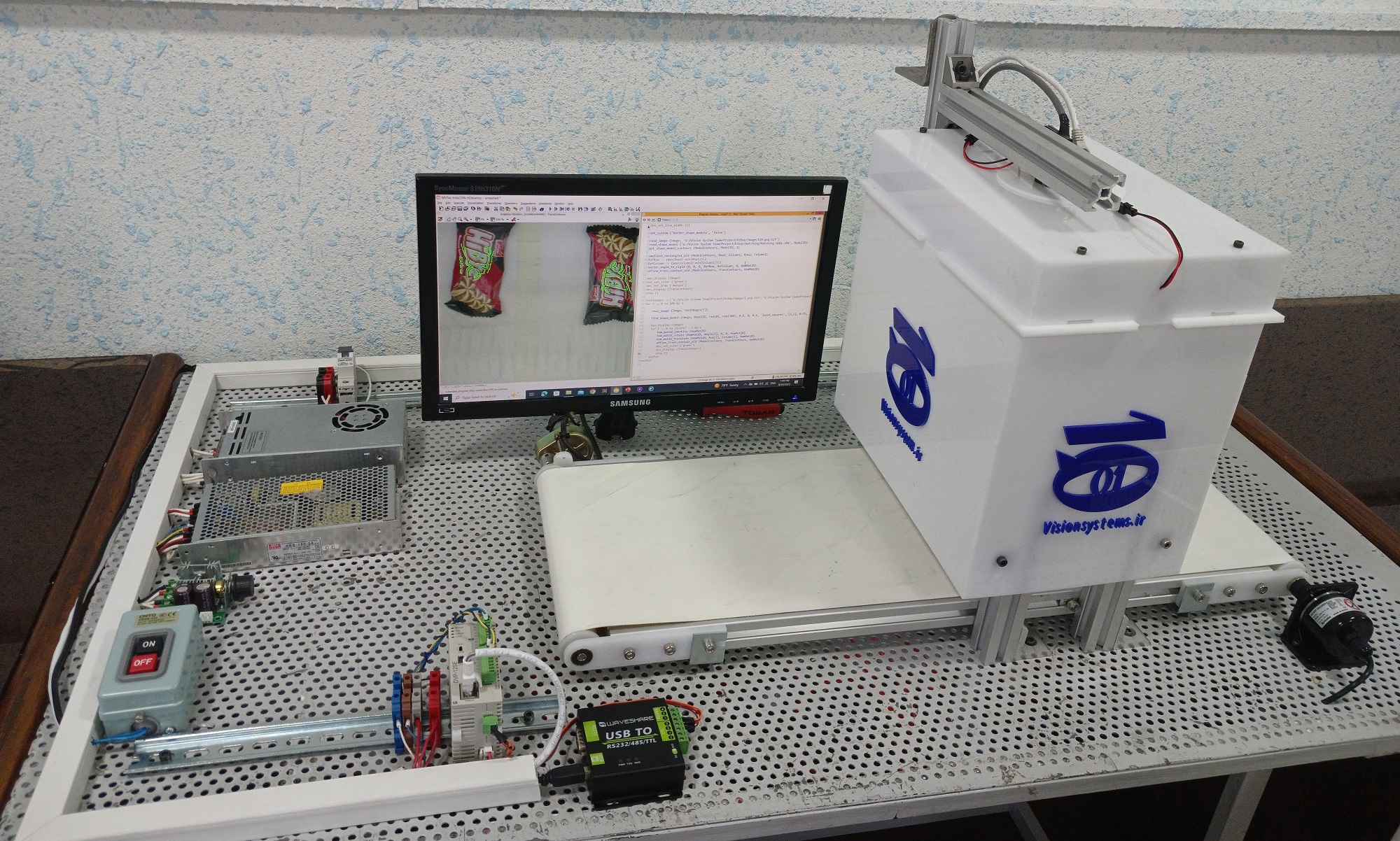
Machine vision systems include the main components of camera, light and image processing software. The best software for industrial image processing is HALCON software. Here we have used an encoder and PLC to send the shooting signal to the camera. The photos taken by the camera are sent to the HALCON program, by writing a suitable program in this software, we can extract information from the photos.
Product identification software on the production line
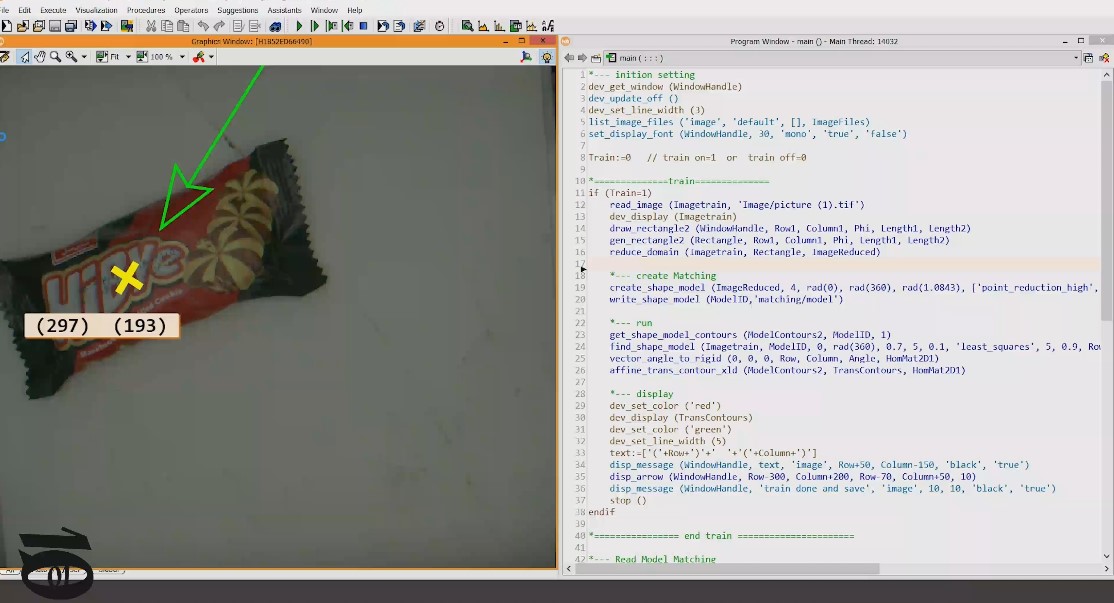
Object detection algorithm is used to write product identification program in HALCON software . We consider the print on the biscuit package as an object, and to recognize the packages, the desired print must be recognized. The challenge was that some of the biscuits could not be found due to the glossy packaging of the biscuits!

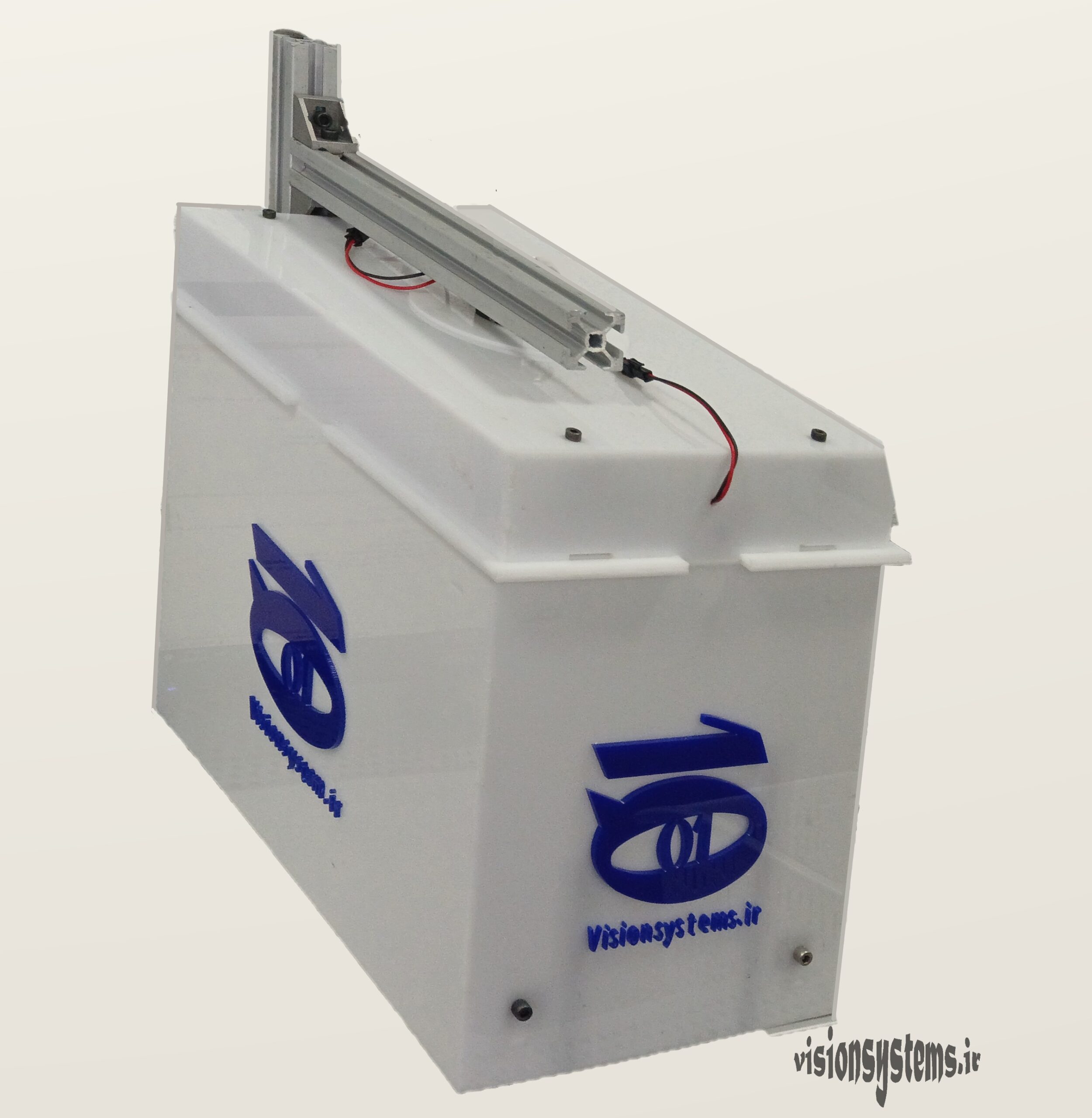
Fixing the problem of strong light reflection in dark room image processing
To solve this problem, we have used a handmade light inside a dark room. The darkroom is a dark space that prevents disturbing reflections on the products so that proper photos can be sent to the program. By improving the lighting , coding becomes easier and the certainty of the program increases.
Sending location coordinates to parallel picking & packing robots
By detecting the percentage of biscuits by the program, their exact location is determined by the program and displayed on the monitor screen .
In projects related to automatic packaging, these location coordinates are sent to the robot and the robot uses it to pick up the product.
